当研究室では機械や構造物に生じる振動の制振,マルチボディシステムの運動解析法などの研究に取り組んでいます.
これらの研究概要を紹介します.
(1) 質量切換型ダンパによる制振
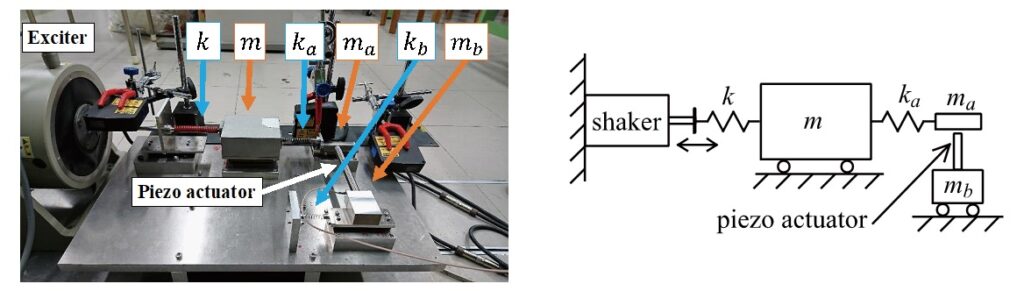
制振装置の代表例として動吸振器があります.振動工学の教科書に書かれているように,動吸振器は定点理論に従って設計することで高い制振性能を有します.このテーマは,動吸振器の質量を切り替えることで制振性能の向上を試みるものです.このテーマでは,動吸振器の質量を2つに分け,ピエゾアクチュエータによるクラッチ機構を用いて2つの質量を接続したり,切り離したりすることで制振性能の向上を狙います.
下図はその実験装置と模式図です.これまでの研究で,パラメータを適切に選べば,動吸振器と比較して,最大振幅を小さくでき,主系のパラメータ変動による制振性能の悪化も小さくできることをシミュレーションと実験により確認しています.
(2) マルチボディシステムの運動解析法
このテーマは,マルチボディシステムと呼ばれる,物体がジョイントで繋がれてできた系の効率的な運動解析法に関する研究です.マルチボディシステムの運動を支配する方程式は,物体がジョイントで繋がれていることを記述した拘束方程式と運動方程式からなります.一般には拘束方程式は代数方程式となり,運動方程式は時間微分を含むため微分方程式となります.したがってマルチボディシステムの運動解析は,代数方程式と微分方程式の連立方程式を解く問題になります.
この研究では拘束方程式から得られる行列に対する零空間行列を用いることで高効率な解析を行うことができる方法に取り組んでいます.
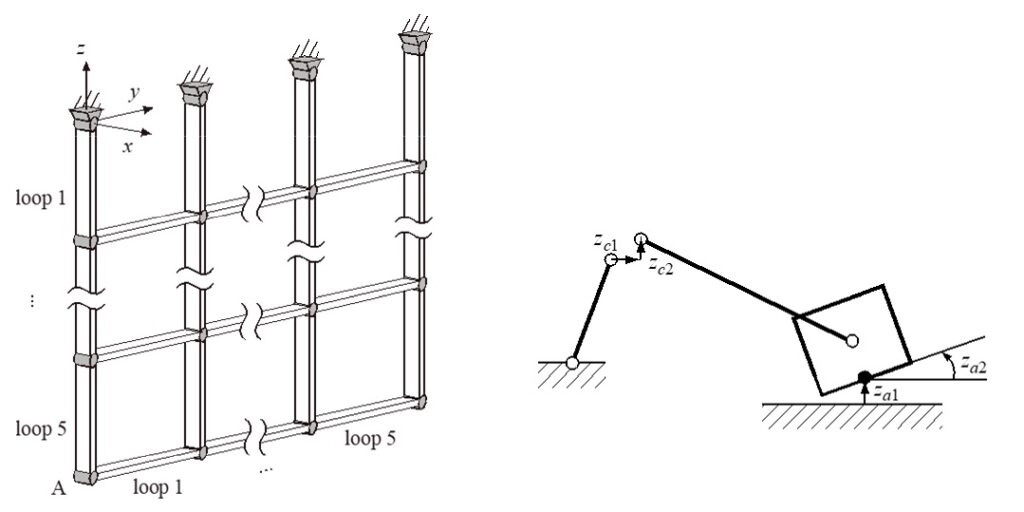
左下図に示す3次元多重平行リンク機構の運動解析は1000点の時刻歴応答を求めるのに0.5秒以下で計算できます. また右下図に示すようにジョイントを仮想的に切断することにより,そのジョイントに生じる拘束力も効率的に求めることが可能です.
(愛知工業大学 工学部 K.K)