【研究目的】
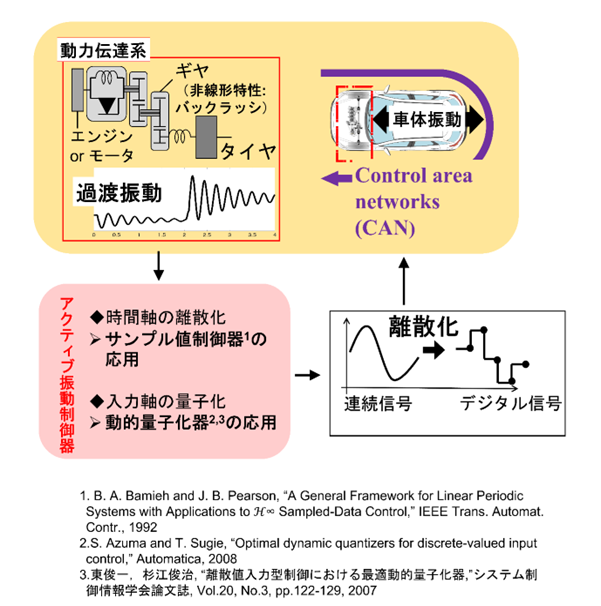
自動車の快適性や走行性能を向上させるためには、動力伝達系に生じる振動の抑制が必要である。本研究は、このアクティブ振動制御技術に関して、制御入力の離散化制約(時間軸の標本化や制御入力値の量子化)を考慮したデジタル制御手法を開発する。
【研究内容】
動力伝達系の振動制御に、先行研究で提案されているサンプル値制御理論や最適動的量子化器を応用することで、よりロバストな制御系を構築する。提案する制御系を動力伝達系に対して適用し、その振動制御性能を検証する。
公募研究テーマ(Bスキーム)
2023年度
研究:
【研究目的】
自動車の快適性や走行性能を向上させるためには、動力伝達系に生じる振動の抑制が必要である。本研究は、このアクティブ振動制御技術に関して、制御入力の離散化制約(時間軸の標本化や制御入力値の量子化)を考慮したデジタル制御手法を開発する。
【研究内容】
動力伝達系の振動制御に、先行研究で提案されているサンプル値制御理論や最適動的量子化器を応用することで、よりロバストな制御系を構築する。提案する制御系を動力伝達系に対して適用し、その振動制御性能を検証する。