【研究目的】
回転体の挙動に対して寸法精度や外力の影響を明確にし,回転体が動的に偏芯することで生じるアンバランス起因の強制力予測技術を確立する.
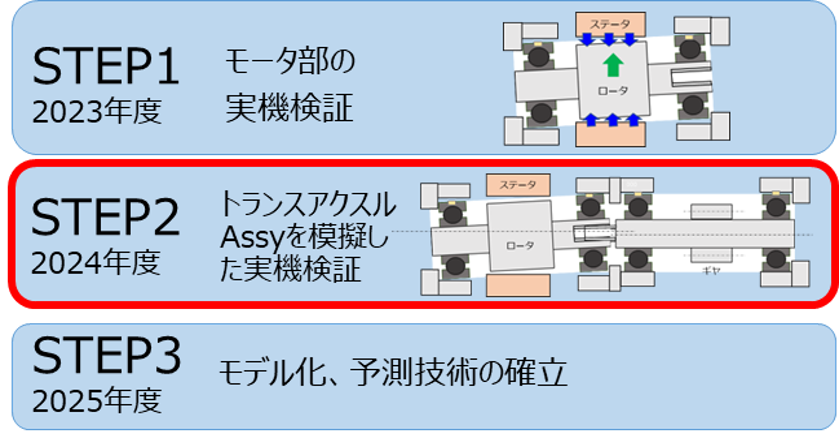
【研究内容】
モータの高回転化に伴い,回転体のアンバランス起因の振動現象が顕在化することが懸念される.電動車のトランスアクスル内部のギヤトレーン挙動は,回転体自体の質量アンバランスだけでなく,支持系の寸法精度や結合要素の精度,さらにモータ電磁気力やギヤのかみあい反力等の外力の影響も受ける複雑な挙動である.
よって,各影響因子と回転体の挙動の関係を把握してモデル化し,強制力予測技術を確立する.